![]()
Sidst opdateret 10.5.13.
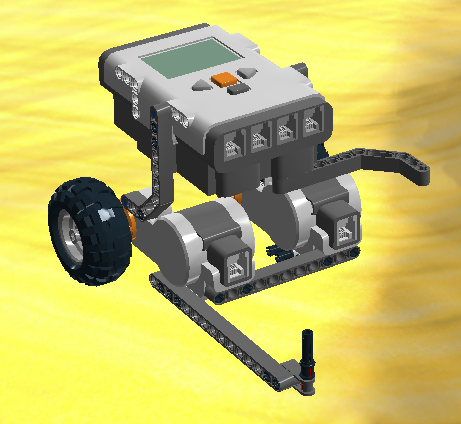
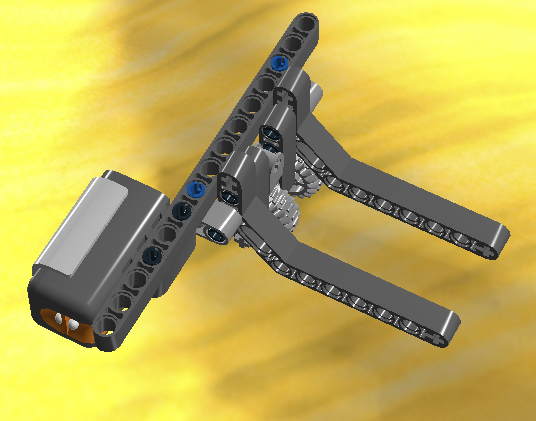
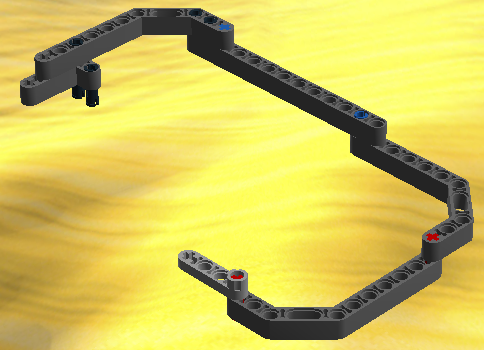
Bygning af robot basebilHent byggevejledningen for base og start med at bygge basen:Ĺben byggevejledningen, filen WRO2013base.lxf, i Lego Digital Designer. Under menuen View skiftes til Building guide mode. Nu viser LDD en byggevejledning i 26 trin. Der er desvćrre ikke mĺl pĺ de aksler, som skal bruges. I byggevejledningen bruges to aksler til hjulene. Akslerne er to sorte 6'ere. Aksler mĺles som vist i NXT Brugervejledning side 80: Hent byggevejledningen for forhjulene forhjul: Ĺben byggevejledningen, filen forhjul.lxf, i Lego Digital Designer. Byg forhjulene efter byggevejledningen pĺ 8 trin. Den grĺ akse er en 5'er. Monter forhjulene pĺ basen som vist her (klik pĺ billedet for at se detaljer): De to motorer skal tilsluttes port B og C, venstre motor i křrselsretningen til port C, hřjre motor i křrselsretningen til port B. Lyssensoren skal tilsluttes til port 1. Ledningerne skal trćkkes, sĺ de ikke spćrre for, at boldene kan ligge i kurven. En mĺde at trćkke ledningerne pĺ er vist her (klik pĺ billedet for at se detaljer): Hent byggevejledningen for kurven: Ĺben byggevejledningen, filen kurv.lxf, i Lego Digital Designer. Byg kurven efter byggevejledningen pĺ 7 trin. Monter kurven pĺ basen som vist her (klik pĺ billedet for at se detaljer): |