![]()
Sidst opdateret 13.6.13.
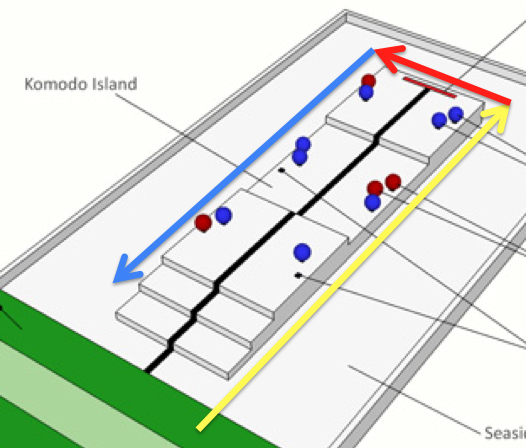
Java programmering af robot basebilNu kan det afprřves, om den nybyggede robot basebil kan křrer rundt omkring Komodo Island langs den hvide vćg. Der er lavet et Java program, kaldet AroundIsland, som kan fĺ robotbilen til at fřlge fřrst den gule pil, sĺ den rřde og sidst den blĺ pil, sĺ bilen kommer rundt omkring Komodo Island som vist (klik pĺ billedet for at se en video af en křrsel):
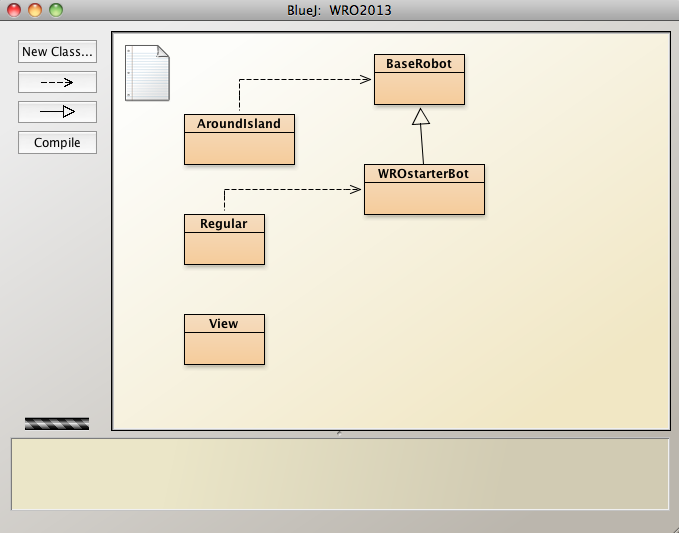
Start med at fĺ Java programmet AroundIsland til at styre den nybyggede robot:
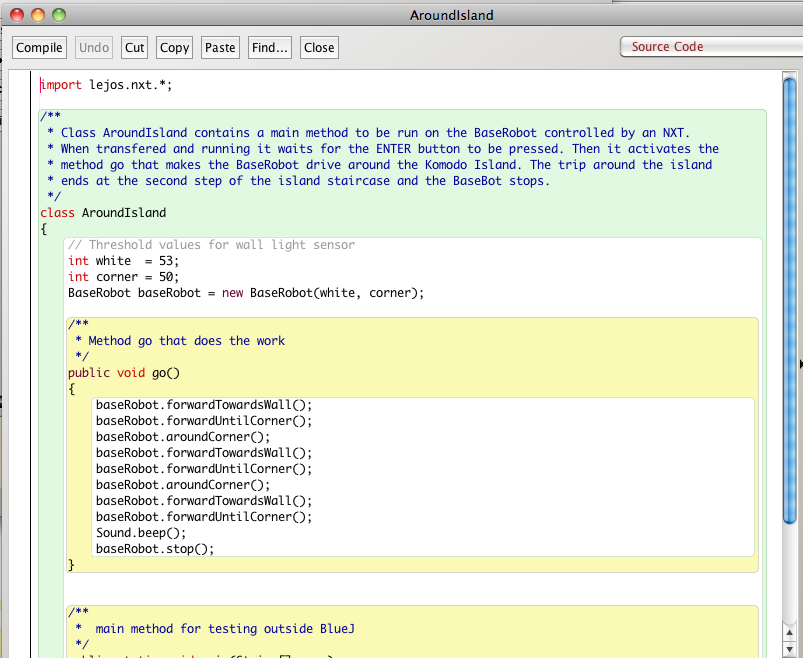
Metoden go i AroundIslandNĺr kassen AroundIsland ĺbnes ved hjćlp af Open Editor ser det sĺdan ud:
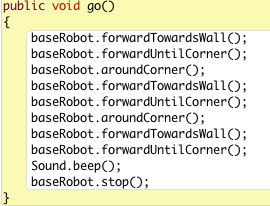
Linierne inde i metoden med navnet go er den del af teksten i vinduet, som fĺr robotbilen til at křre rund om Komodo Island:
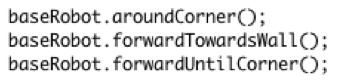
Linierne udfřres efter hinanden startende med den fřrste linie baseRobot.forwardTowardsWall();. De to fřrste linier fĺr bilen til at fřlge den gule pil pĺ ruten:
I den fřrste linie aktiveres en metode forwardTowardsWall() som fĺr bilen til at křre fremad og holde lidt til venstre. I den nćste linie aktiveres metoden forwardUntilCorner() som fĺr programmet til at vente pĺ, at bilen i sin bevćgelse langs vćggen er ud for kanten, altsĺ for enden af den gule pil. Prřv at indsćtte baseRobot.stop(); Button.ENTER.waitForPressAndRelease(); efter de to linier. Det vil fĺ bilen til at standse for enden af den gule pil og vente pĺ, at den orange knap, kaldet ENTER, bliver trykket ned. Hvis ikke det sker, skal der nok foretages ćndring af Tćrskelvćrdier for lyssensor vćrdier. De tre nćste linier styrer bilen langs den rřde pil:
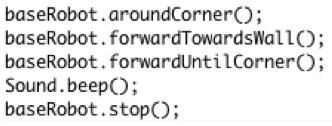
Prřv igen at indsćtte baseRobot.stop(); Button.ENTER.waitForPressAndRelease(); efter de tre linier, sĺ bilen standser for enden af den rřde pil. De sidste fem linier fĺr bilen til at fřlge den blĺ pil og stoppe med en beep lyd:
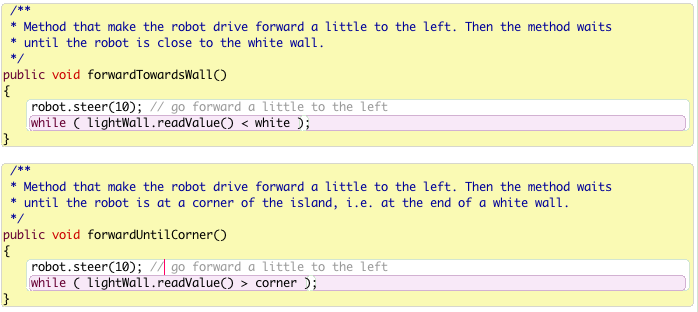
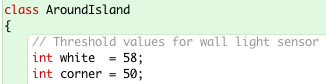
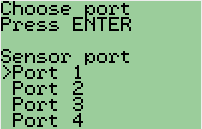
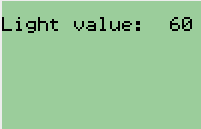
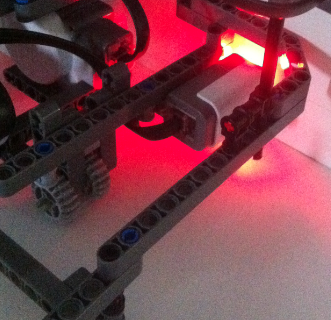
Tćrskelvćrdier for lyssensor vćrdierRobotbilen har monteret en lyssensor foran til venstre:Det er lyssensoren programmet AroundIsland bruger til at holde řje med, om bilen er tćt pĺ den hvide vćg eller om bilen er nĺet hen forbi enden af en vćk. De to linier som gerne skal fĺ robotten til at fřlge den gule pil, er jo som vist ovenfor: De to metoder, som aktiveres i de to linier, kan findes ved at bruge Open Editor pĺ kassen BaseRobot. Metoderne ser sĺdan ud: I begge de to metoder er det fřrste linie robot.steer(10); som fĺr robotbilen til at křre fremad og holde lidt til venstre. Det er tallet 10 som bestemmer, hvor meget der holdes til venstre: Den venstre motor křrer med 10 % mindre fart end den hřjre motor. Den nćste linie i begge metoder er sĺkaldte ventelřkker, som fĺr programmet til at vente sĺlćnge (while) den betingelse er opfyldt, som stĺr inde i parenteserne. I ventelřkken while ( lightWall.readValue() < white ); er betingelsen, som undersřges igen og igen, om lyssensoren's vćrdi, lightWall.readValue(), er mindre end vćrdien af konstanten white. Sĺ lćnge det er tilfćldet, bliver programmet altsĺ i ventelřkken. Det er fřrst, nĺr lysprocenten er lig konstanten white eller střrre, at programmet fortsćtter. I kassen AroundIsland ses, hvilke vćrdi konstanten white har: Det betyder, at programmet bliver i ventelřkken, indtil bilen i sin křrsel fremad mod venstre kommer sĺ tćt pĺ vćggen, at lyssensoren registrerer en lysprocent pĺ 58 % eller derover. Hvis lyssensoren under křrslen aldrig kommer i nćrheden af en hvid vćg, eller vćrdien i nćrheden af den hvide vćg er mindre end 58 %, bliver bilen altsĺ ved med at křre fremad og lidt til venstre, fordi programmet sĺ at sige "hćnger" i ventelřkken. I den anden ventelřkke while ( lightWall.readValue() > corner ); er betingelsen, som fĺr programmet til at vente, at lyssensoren's vćrdi er střrre end vćrdien af konstanten corner, som jo ovenfor kan ses at vćre sat til 50 %. Der ventes altsĺ indtil lyssensoren under křrslen har registreret en lysprocent pĺ 50 % eller derunder. Hvis lysprocenten bliver ved med at vćre over 50 %, selvom bilen nĺr til enden af den hvide vćg, vil bilen altsĺ fortsćtte sin křrsel, fordi programmet "hćnger" i den anden ventelřkke. De to vćrdier white = 58 og corner = 50 kaldes tćrskelvćrdier, fordi de bruges til at afgřre om de registrerede vćrdier fra lyssensoren er over eller under en af de valgte tćrskler. Pĺ den mĺde afgřr programmet, hvilke situation robotbilen er i: Tćt pĺ hvid vćg eller for enden af vćg. Om sĺ det passer med robotbilens virkelige situation afhćnger af tćrskelvćrdierne og lysforhold pĺ banen. Bestemmelse af tćrskelvćrdier for lyssensorenVćrdierne 58 for konstanten white og 50 for konstanten corner er fundet ved at mĺle, hvilke lysprocenter lyssensoren registrerer, nĺr bilen er tćt pĺ den hvide vćg, ved en kant for enden af en hvid vćg og ved stop ud for trappen.Til at mĺle lysprocenterne er programmet View blevet brugt pĺ NXT. Programmet overfřres og křres pĺ NXT ved at ĺbne kassen View's menu. Nĺr View křrer pĺ NXT, ser skćrmen sĺdan ud til at starte med: Tegnet > ud for Port 1 pĺ skćrmen viser, at Port 1 er valgt. De to lysegrĺ knapper For at bestemme de to tćrskelvćrdier startes med, at robotbilen sćttes med lyssensoren tćt pĺ en hvid vćg: Nu mĺles lysprocenten ud for hvid, f.eks. 62 %. Da lysprocenten kan variere rundt langs vćggene, sćttes konstanten white noget lavere end 62 nemlig white = 58. Nĺr lyssensoren registrerer en vćrdi lig vćrdien for white eller derover, antages det i programmet, at bilen altsĺ er tćt pĺ den hvide vćg. Dernćst sćttes robotbilen for enden af en vćg og ved stop punktet ud for trappen: Lysprocenten for enden af vćggen er f.eks. 40 % og lysprocenten ved stop er mĺske noget hřjere f.eks. 46 %. Ud fra de to mĺlinger sćttes vćrdien af corner lidt hřjere end den střrste af de to mĺlte vćrdier, nemlig f.eks. corner = 50, sĺ der er plads til lidt variation i de mĺlte lysprocenter. Nĺr lyssensoren registrerer en vćrdi lig vćrdien for corner eller derunder, antages det i programmet, at bilen er for enden af en hvid vćg eller ved stop punktet ud for trappen. Om det er den ene eller den anden situation afhćnger af, hvor i programmet registreringen sker. |